Version interactive avec LaTeX compilé
ÉCOLE POLYTECHNIQUE
CONCOURS D'ADMISSION 2019
CONCOURS D'ADMISSION 2019
VENDREDI 19 AVRIL 2019-14h00-18h00 FILIÈRE MP (Spécialité P&SI)
Épreuve n
PHYSIQUE ET SCIENCES DE L'INGÉNIEUR (X)
Durée : 4 heures
Cette épreuve comprend deux parties indépendantes. La première porte sur le phénomène d'adhérence entre deux solides en contact. La seconde s'intéresse au problème du maintien en contact du pantographe d'un train avec la caténaire qui l'alimente en électricité. Il est conseillé de ne pas consacrer plus de deux heures par partie.
Partie Physique Étude du phénomène de reptation thermique
Cette partie est consacrée à l'étude des propriétés d'adhérence entre deux solides. Nous analyserons d'abord le phénomène de "reptation thermique" qui est une manifestation de l'influence de la dilatation thermique sur l'état d'adhérence de deux solides en contact. Nous interpréterons ensuite, sur la base d'un modèle microscopique, les lois phénoménologiques de Amontons-Coulomb.
Rappelons d'abord ces lois phénoménologiques décrivant le comportement du contact entre deux solides et sur lesquelles repose cette étude. Nous considérons un solide (1) en contact avec un solide (0). Nous notons
- si
, on n'observe pas de glissement entre les deux solides, au point de contact; - si
, il apparaît du glissement au point de contact. La vitesse de glissement du solide (1) par rapport au solide (0) vérifie alors et .
La grandeur sans dimension positivereprésente le coefficient d'adhérence entre les deux surfaces. Il est indépendant de l'aire apparente de la surface de contact. On entend par aire apparente l'aire définie par les dimensions de la surface.
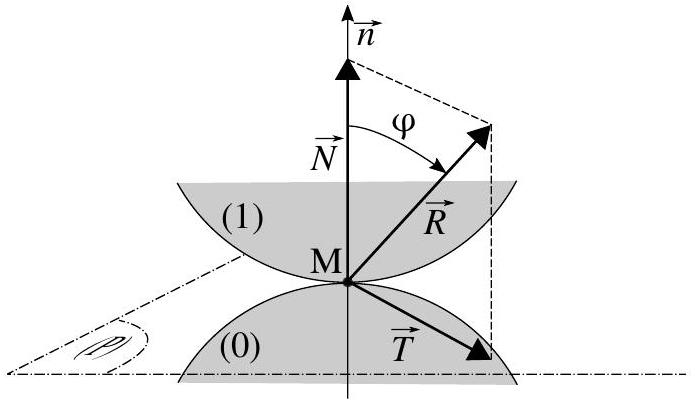
Figure 1 - Décomposition de la force
1 Conditions d'équilibre d'un solide sur un plan incliné.
Un solide parallélépipèdique de masse
- Le solide (1) est supposé, a priori, à l'équilibre. Exprimer
et la somme . On fera apparaître le rapport . Notons que le nombre d'inconnues excède celui des équations.
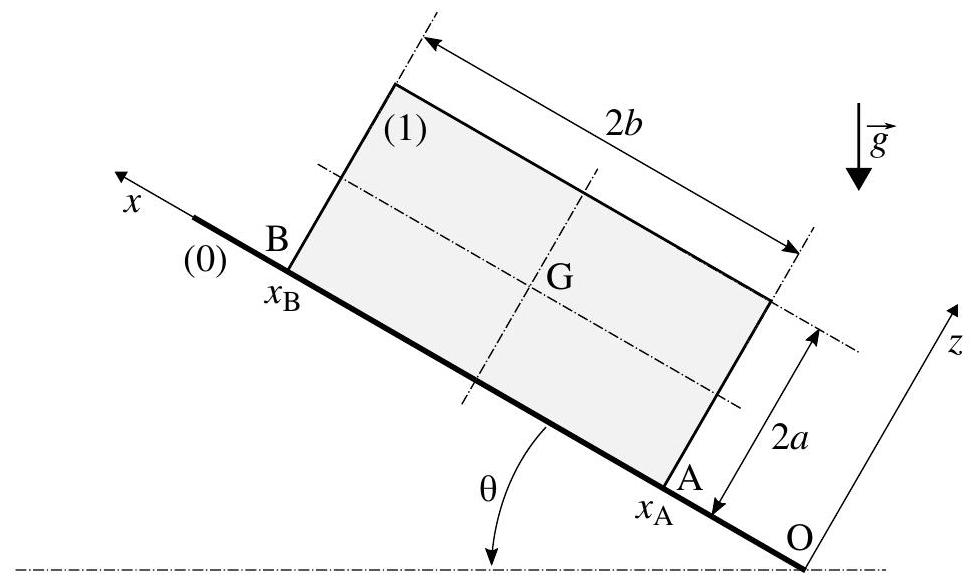
FIGURE 2 - Solide parallélépipèdique reposant sur un plan incliné d'un angle
- Établir les conditions que doit satisfaire
pour que l'équilibre du solide soit effectif.
- Dans toute la suite, nous supposerons que
.
Préciser ce que traduit cette condition.
- Nous notons
et l'état d'adhérence de chacun des contacts A et B.
- Établir que les variables
et vérifient l'équation:
On exprimera les constantes
4. Représenter, dans le plan
N.B. : Réaliser ce tracé avec soin et clarté et à une échelle suffisante (par exemple, 5 cm pour une unité). Il sera complété par la suite.
5. Sur le même tracé, représenter et caractériser le domaine
6. Préciser de quelle façon se traduit, sur ce graphique, l'indétermination évoquée en fin de la question (1).
7. Illustrer (toujours sur le même graphique) une situation correspondant à la limite de glissement du solide. Préciser alors la relation fixant la valeur de
4. Représenter, dans le plan
N.B. : Réaliser ce tracé avec soin et clarté et à une échelle suffisante (par exemple, 5 cm pour une unité). Il sera complété par la suite.
5. Sur le même tracé, représenter et caractériser le domaine
6. Préciser de quelle façon se traduit, sur ce graphique, l'indétermination évoquée en fin de la question (1).
7. Illustrer (toujours sur le même graphique) une situation correspondant à la limite de glissement du solide. Préciser alors la relation fixant la valeur de
2 Reptation thermique.
Dans la situation initiale, le solide (1) est à l'équilibre sur le plan (0). Cet équilibre est supposé assez éloigné de la limite de glissement. Il est alors soumis à de lentes variations cycliques de température entre
Nous supposons que dans la situation initiale, à
Nous supposons que dans la situation initiale, à
- Nous ne tiendrons pas compte de l'effet (du second ordre) des variations de température sur le rapport
.
- Toujours en complétant le tracé réalisé en réponse à la question (4), situer le point
de correspondant à la situation initiale.
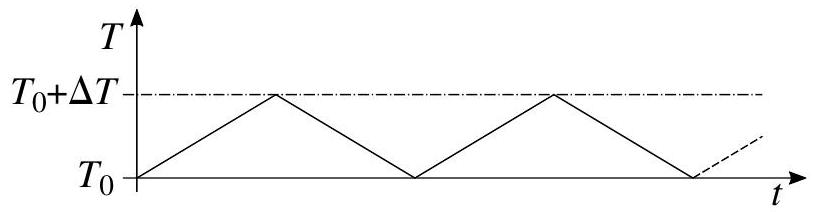
Figure 3 - Cycles thermiques subis par le solide (1).
- Indiquer, en précisant le raisonnement tenu, la conséquence du chauffage du solide (1) sur le déplacement du point
depuis sa situation . - Représenter qualitativement, en correspondance des cycles thermiques représentés figure (4), l'évolution temporelle de chacune des abscisses
et des arêtes A et B du solide (1). Nous supposons que l'amplitude thermique est suffisante pour faire apparaître du glissement, tantôt au niveau du contact A , tantôt au niveau du contact B .
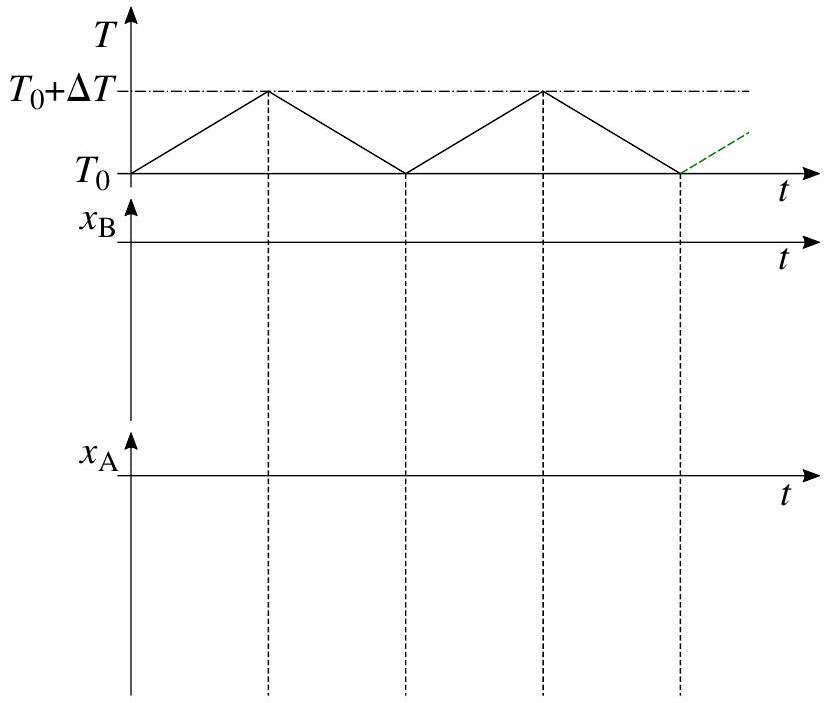
Figure 4 - Figure à reproduire pour illustrer l'évolution temporelle des abscisses
- En vue de déterminer la condition que doivent satisfaire conjointement l'amplitude
et l'angle pour assurer l'apparition du phénomène de reptation thermique, nous modélisons le comportement des contacts A et B comme le représente la figure (5). Chacun des contacts A et B du solide (1) avec le plan (0) s'établit par l'intermédiaire d'un patin en liaison élastique linéaire avec le solide (1). Le contact des patins (notés (1A) et (1B) sur la figure (5)) et le plan (0) respecte les relations de Amontons-Coulomb avec le coefficient d'adhérence précédemment introduit. La raideur de chacun des éléments élastiques intervenant dans les liaisons (1)-(1A) et (1)-(1B) est notée . Les variables et situent, relativement à la configuration neutre, la position des patins par rapport au solide (1). Le triplet ( ) définit l'état mécanique et thermique des contacts. Le triplet ( ) caractérise un état de référence.
Nous adoptons, pour décrire la dépendance d'une dimensiond'un solide parallélépipèdique avec sa température , la relation linéaire :
■ La géométrie du solide (1), désormais supposée telle que
11. Relier
11. Relier
- Nous nous plaçons dans la situation telle qu'aucun des patins ne glisse lors du passage de l'état de référence (
) à l'état ( ), conséquence de l'évolution de la température de à .
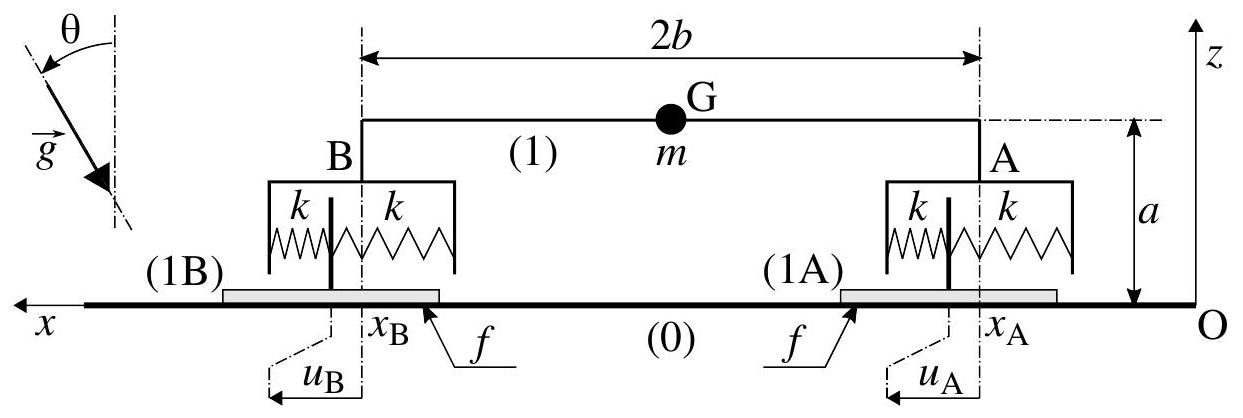
Figure 5 - Chacun des contacts A et B du solide (1) avec le plan (0) est modélisé par un patin, (1A) ou (1B), lié élastiquement au solide (1). Chaque patin est susceptible de glisser sur le plan (0) dans les conditions fixées par les relations de Amontons-Coulomb. On notera que le vecteur
- Relier la différence
aux écarts et .
Nous poserons
13. Montrer comment, graphiquement dans le plan
14. Établir la condition portant conjointement sur l'amplitude
15. Analyser ce résultat.
16. Le dispositif expérimental
13. Montrer comment, graphiquement dans le plan
14. Établir la condition portant conjointement sur l'amplitude
15. Analyser ce résultat.
16. Le dispositif expérimental
- Le phénomène de reptation thermique peut être constaté (hors laboratoire) sur des toitures (peu pentues) recouvertes de tuiles plates ou d'ardoises simplement posées, soumises aux cycles d'ensoleillement.
3 Modèle microscopique du contact entre deux solides.
Nous cherchons à établir un modèle microscopique simple, compatible, à l'échelle macroscopique, avec les relations de Amontons-Coulomb. Imaginons que les surfaces de contact présentent la forme de dents de scie. Les dentures des surfaces étant en prise l'une sur l'autre, comme le représente la figure (6). À l'échelle locale, c'est-à-dire celle d'une dent, nous supposons que la réaction de contact reste normale aux surfaces en contact (ce qui revient à adopter un coefficient de frottement local nul). Le solide (1) est maintenu en contact avec le solide (0) par un effort normal
17. Proposer un encadrement (d'extension raisonnable) des valeurs du coefficient d'adhérence
18. Reproduire le diagramme des forces de la figure (7) en respectant sensiblement les proportions (
17. Proposer un encadrement (d'extension raisonnable) des valeurs du coefficient d'adhérence
18. Reproduire le diagramme des forces de la figure (7) en respectant sensiblement les proportions (
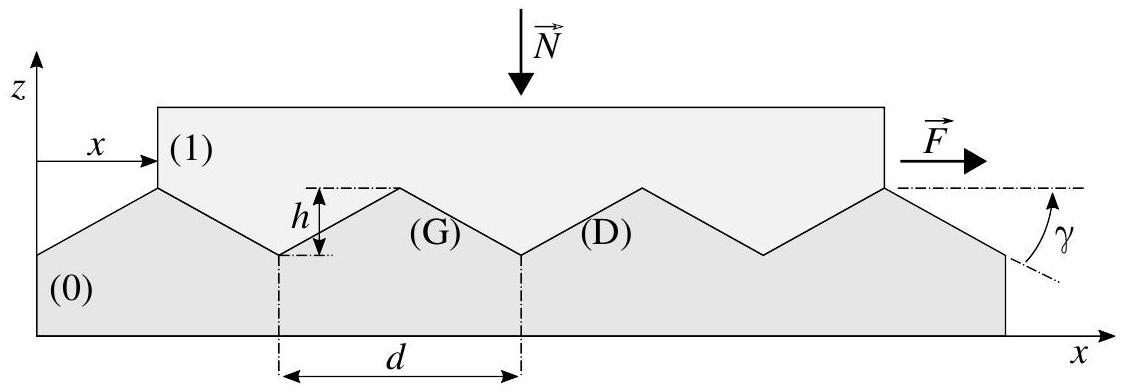
FIGURE 6 - Un modèle de contact, à l'échelle microscopique, entre deux surfaces.
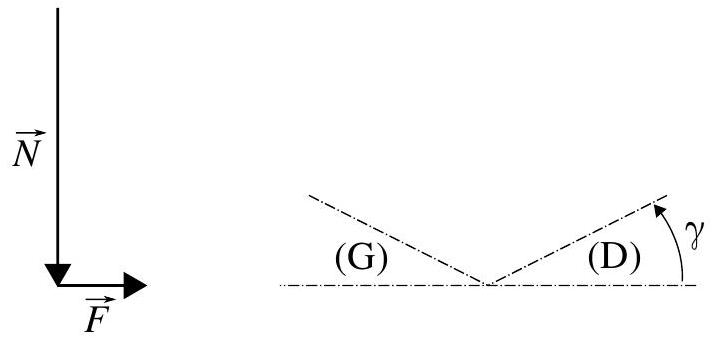
FIGURE 7 - Diagramme (à reproduire et compléter) des forces agissant sur le solide (1). L'inclinaison de la denture est indiquée par la figure en trait pointillé.
- Déduire de ce diagramme le coefficient d'adhérence
, apparaissant à l'échelle macroscopique, correspondant à ce modèle. On précisera le raisonnement tenu. - Imaginons que l'opérateur extérieur applique la force
par l'intermédiaire d'une ficelle et fait croître très progressivement le module de cette force. Représenter graphiquement l'évolution de la composante , en fonction de l'abscisse du solide (1) par rapport au solide (0), lorsque l'opérateur fait progresser le solide (1) d'un pas à droite, et de telle manière que le travail qu'il doit fournir soit minimal. On indiquera sur ce graphique les valeurs particulières qui apparaissent. - Exprimer le travail
. Analyser ce résultat. - Nous considérons que le solide (1) se retrouve de nouveau au repos après le passage d'un motif de denture. Indiquer pourquoi cela revient à introduire, dans ce modèle, implicitement de la dissipation. Préciser comment cette dissipation se manifeste à l'échelle macroscopique.
- Justifions, dans un cadre que nous allons définir, que l'adhérence entre deux solides ne dépend pas de la surface apparente (ou macroscopique) de contact. Nous supposons que les solides sont en contact par un ensemble de micro-surfaces. Ces micro-surfaces résultent de l'écrasement de pics (irrégularités microscopiques de rugosité) sous l'action de l'effort
, comme l'illustre la figure (8). La surface du solide (1) en regard avec le solide (0) est supposée plane, d'aire notée . Il s'agit de la surface apparente de contact. Celle du solide (0) est constituée d'un réseau de pics émoussés sur lesquels repose le solide (1). Nous notons l'aire moyenne d'un îlot de contact. Enfin, nous admettons que la pointe initiale d'un pic, sous l'action de l'effort qu'elle supporte, s'émousse jusqu'à offrir une surface telle que la force par unité de surface qu'elle subit atteigne, en décroissant, une valeur de seuil (propre au matériau).
- Établir que la surface réelle de contact
entre les deux solides est indépendante de la surface apparente . - Nous partons du principe que l'adhérence entre deux solides est une conséquence de l'interaction à courte portée s'établissant entre les atomes des deux surfaces en contact. Argumenter ce point de vue au regard des relations phénoménologiques de Amontons-Coulomb.
- Indiquer comment varie alors le coefficient d'adhérence
avec . Commenter brièvement ce résultat.
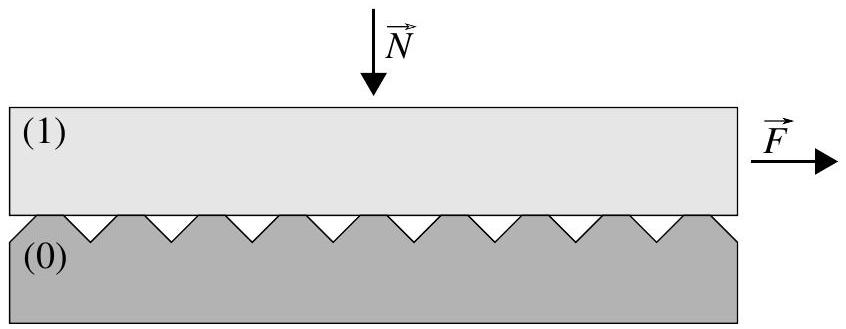
Figure 8 - Le contact entre les solides s'établit par l'intermédiaire de micro-surfaces (îlots de contact). Dans ce modèle, seule la surface du solide ( 0 ) présente un réseau de pics. Sous l'action de la force d'appui
- En conservant le principe général de dentures en prise l'une sur l'autre, proposer une évolution du modèle représenté figure (6) permettant de faire apparaître un comportement élastique (linéaire) du contact entre les solides. En introduisant les paramètres géométriques nécessaires, préciser alors l'expression de la raideur
(intervenant sur la figure (5)), puis celle du rapport (défini à la question (12)), qui correspondraient à cette modélisation des contacts. Enfin, donner l'expression du coefficient d'adhérence associé.
Partie Sciences de l'ingénieur Étude de l'interaction entre le pantographe d'un train et le système caténaire
Nous nous intéressons au couplage mécanique entre un système caténaire et le pantographe d'un train. Ces éléments, représentés figure (1), permettent d'assurer son alimentation électrique par contact glissant. L'exigence de qualité du contact entre le pantographe et le fil d'alimentation d'une part, le souhait de pouvoir atteindre des vitesses de circulation élevées d'autre part, nécessitent de fixer un compromis : le maintien d'un bon contact autorise une vitesse élevée, mais une vitesse élevée dégrade la qualité du contact. Les dysfonctionnements de ce dispositif sont responsables de plus d'un million de retards chaque année, en Europe. Une bonne compréhension de son fonctionnement permet de concevoir des systèmes adaptés aux différentes contraintes de fonctionnement et d'anticiper les actions de maintenance.
Le système caténaire est l'ensemble constitué d'un poteau, généralement en acier, supportant un système complexe de potence, appelé console, auquel est accroché le fil de contact assurant l'alimentation électrique du train. La console est un assemblage de tubes, souvent en alliage léger, possédant un degré de liberté de rotation autour d'un axe vertical permettant de compenser les variations de longueur du fil de contact. Afin de limiter le couplage dynamique entre le câble porteur et le fil de contact, ce dernier est lié à la console par un système antibalançant et un bras de rappel présentant une faible inertie. Le pantographe est un assemblage de tubes articulés fixé sur le toit de la locomotive par l'intermédiaire d'isolateurs. En se déployant élastiquement, il peut compenser les variations de hauteur du fil de contact. Il est composé d'un archet assurant le contact avec la caténaire, d'un bras articulé appelé grand cadre. Le contact entre ces deux pièces est assuré par une boîte à ressort qui permet à l'archet de pivoter pour s'adapter à la déformée du fil de contact. Le détail d'un pantographe est donné figure (2).
Le système caténaire est l'ensemble constitué d'un poteau, généralement en acier, supportant un système complexe de potence, appelé console, auquel est accroché le fil de contact assurant l'alimentation électrique du train. La console est un assemblage de tubes, souvent en alliage léger, possédant un degré de liberté de rotation autour d'un axe vertical permettant de compenser les variations de longueur du fil de contact. Afin de limiter le couplage dynamique entre le câble porteur et le fil de contact, ce dernier est lié à la console par un système antibalançant et un bras de rappel présentant une faible inertie. Le pantographe est un assemblage de tubes articulés fixé sur le toit de la locomotive par l'intermédiaire d'isolateurs. En se déployant élastiquement, il peut compenser les variations de hauteur du fil de contact. Il est composé d'un archet assurant le contact avec la caténaire, d'un bras articulé appelé grand cadre. Le contact entre ces deux pièces est assuré par une boîte à ressort qui permet à l'archet de pivoter pour s'adapter à la déformée du fil de contact. Le détail d'un pantographe est donné figure (2).
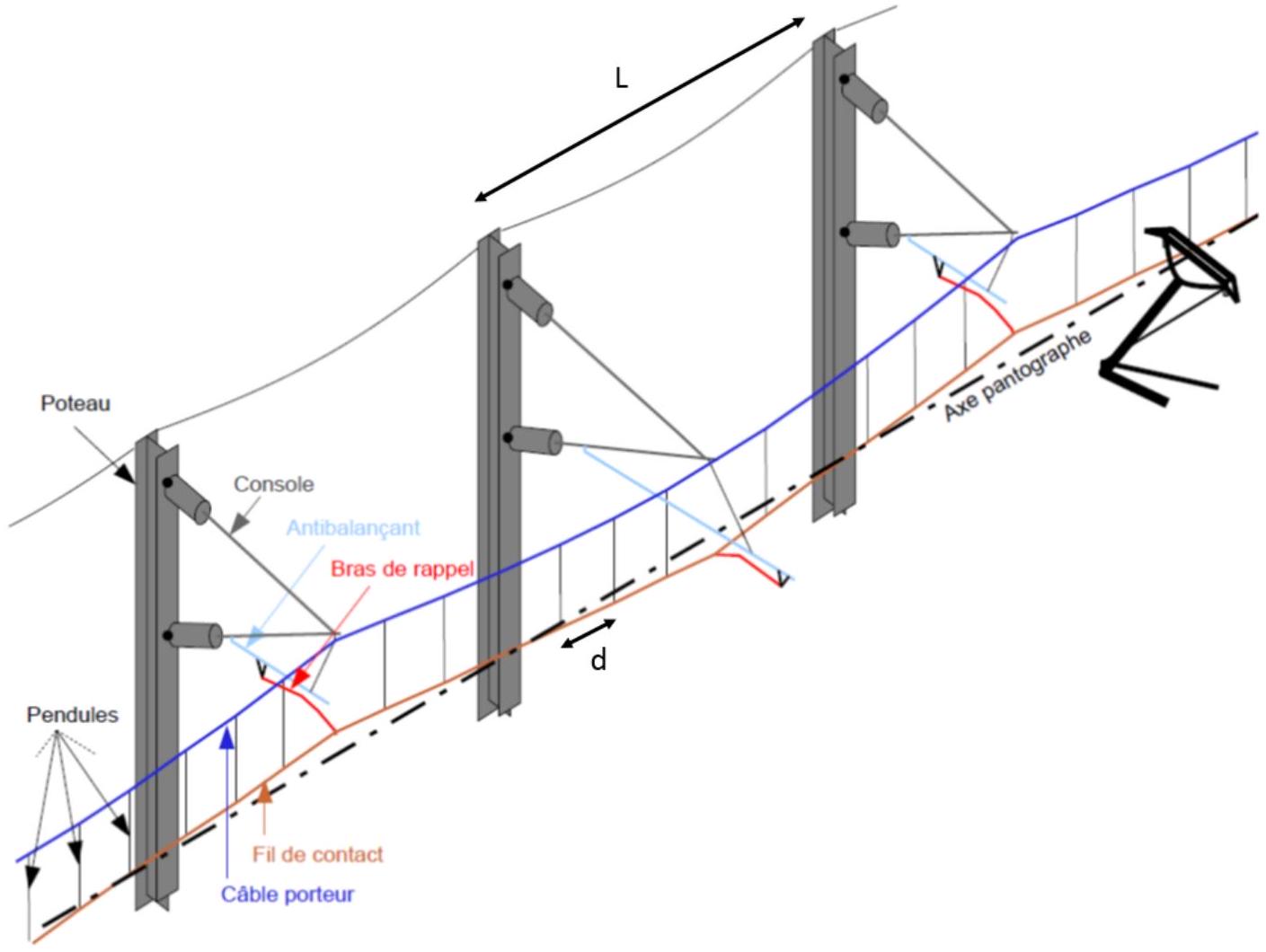
Figure 1 - Structure générale du système caténaire.
Nous déterminerons d'abord la forme adoptée par le fil porteur sous l'action du poids du fil de contact. Nous étudierons ensuite la réponse dynamique du pantographe lorsqu'il glisse le long du fil de contact. Enfin, dans le but d'identifier les risques de décollement du pantographe, nous nous intéresserons à sa réponse verticale dynamique à un défaut de positionnement du fil de contact.
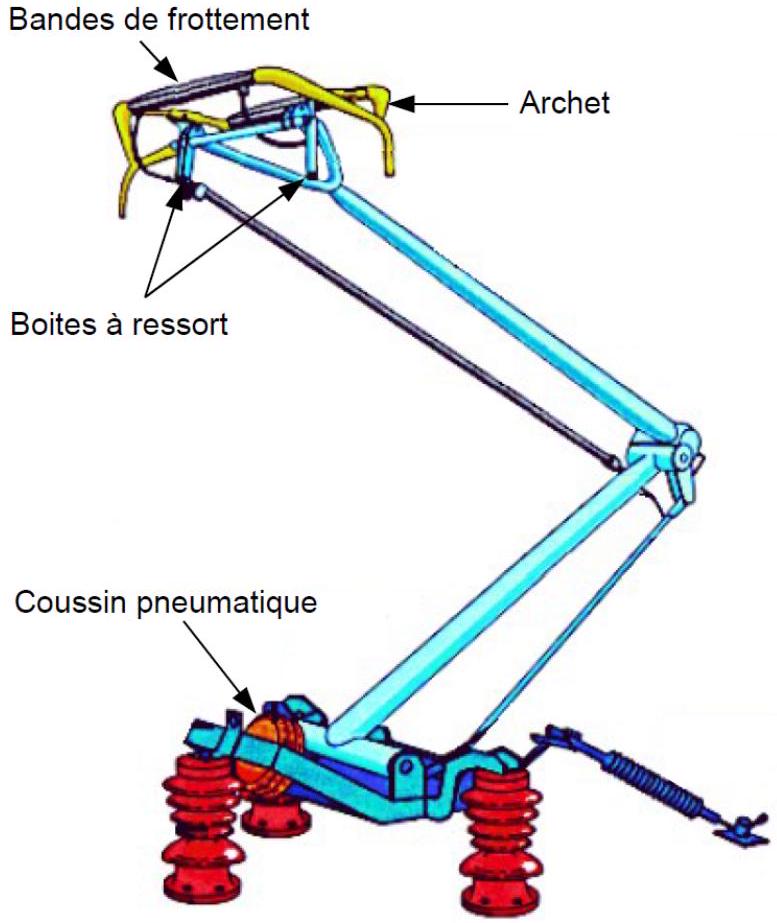
Figure 2 - Structure détaillée du pantographe de Faiveley Transport (Type Cx).
1 Étude de la déformée statique du câble porteur.
Nous considérons que le câble porteur est fixé au niveau des poteaux supportant l'ensemble caténaire. Nous notons

Figure 3 - Photographie d'un fil de contact (à gauche). Sa section est modélisée par un disque de diamètre
- Nous supposons que le seul chargement appliqué sur le câble porteur est le poids du fil de contact transmis par les suspentes. Déterminer l'effort moyen
auquel est soumis une suspente, en fonction de la distance , du diamètre du fil de contact, de l'accélération de la pesanteur et la masse volumique du cuivre. Calculer la valeur de cette force pour et .
- Nous décomposons le câble porteur en
tronçons de longueur . La figure (4) représente la déformation d'ensemble du câble ainsi que l'une de ses portions au niveau d'un point (nœud ) supportant une suspente. Nous notons et , respectivement les angles formés entre l'horizontale et les tronçons du câble porteur, avant et après le nœud . De même, nous notons et les forces de tension transmises par le câble et auxquelles les tronçons situés de part et d'autre du nœud sont soumis. Dans ce modèle le câble porteur est supposé sans masse et sans raideur de flexion (c'est-à-dire qu'il est supposé infiniment souple).
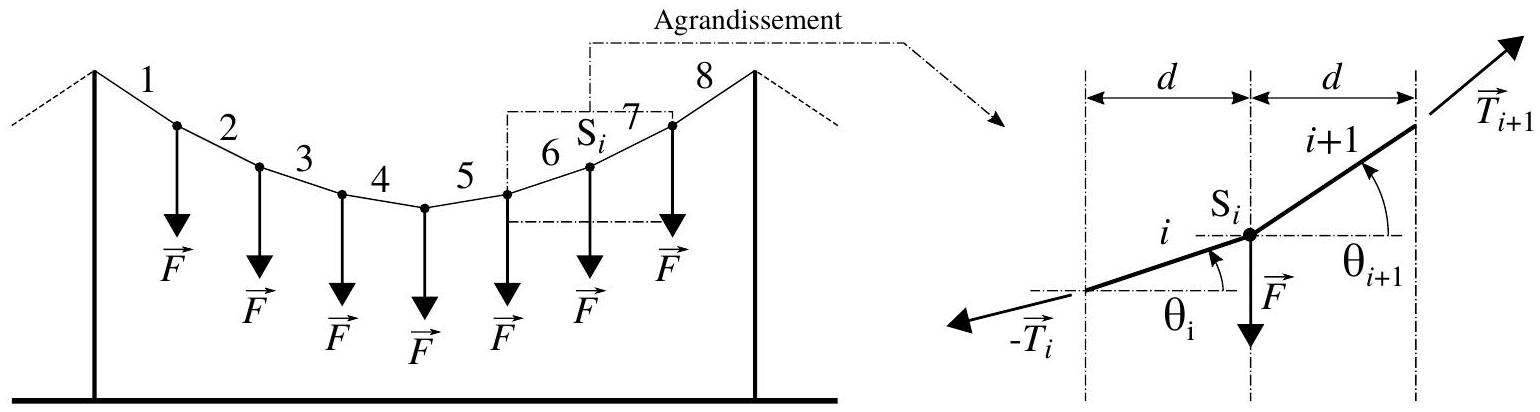
Figure 4 - À gauche : Déformation du câble porteur sous l'action des
- Établir les deux équations algébriques traduisant l'équilibre du nœud
. - Nous nous plaçons désormais dans le cas tel que
. Exprimer l'angle en fonction de , et du rapport . La grandeur désignant la tension à laquelle le câble est soumis. - Déterminer l'angle
puis exprimer en fonction du rapport , du nombre de suspentes et du paramètre de situation . - Exprimer la déflexion maximale
du câble porteur en fonction de et . On n'envisagera que le cas impair. - Calculer la valeur de la déflexion maximale
pour .
2 Étude du comportement dynamique du pantographe.
Nous nous intéressons au comportement dynamique du pantographe et aux conditions de son décollement du fil de contact. Lors du déplacement d'un train à la vitesse
Afin de maintenir un contact permanent avec le fil de contact, sans occasionner d'usure excessive, le pantographe doit présenter une raideur verticale faible. Nous supposons alors ce fil comme infiniment rigide comparativement au pantographe (vis-à-vis de son déploiement vertical). Le modèle masse-ressort-amortisseur adopté pour décrire le comportement dynamique du pantographe est illustré figure (5). Ce modèle correspond à une idéalisation, en ne considérant que son premier mode vibratoire. Nous notons
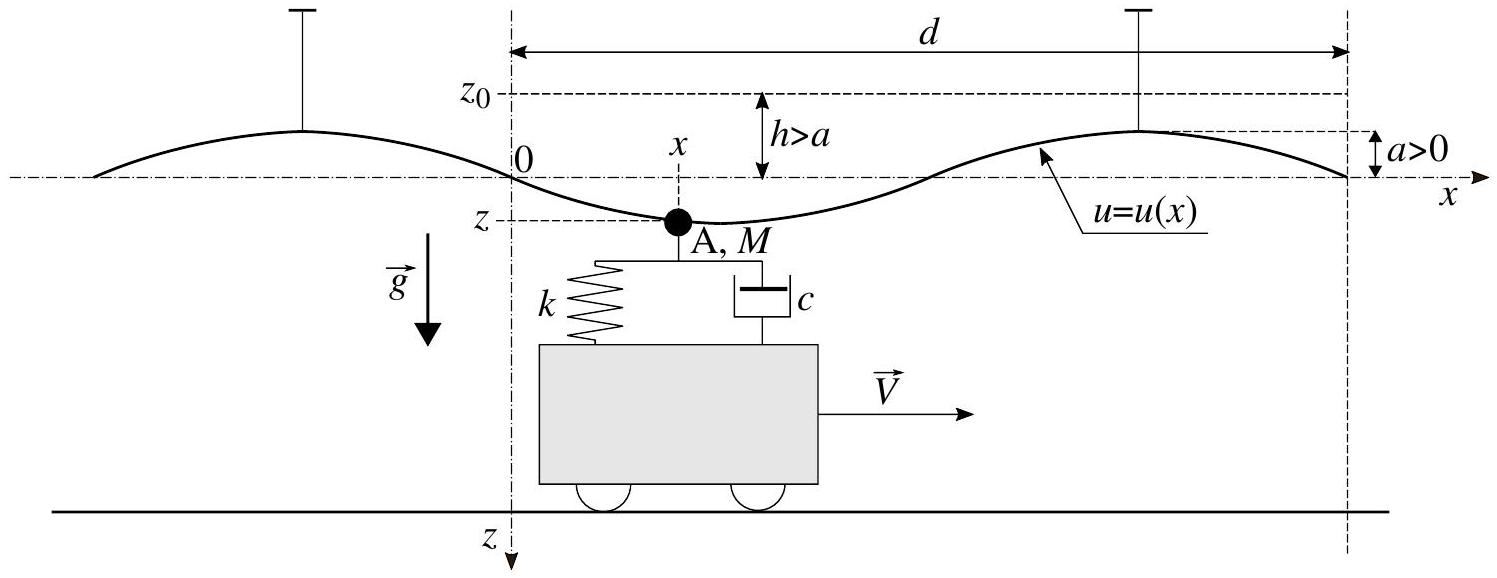
Figure 5 - Modèle masse-ressort-amortisseur représentant le pantographe. Ce système mécanique est soumis à l'action du fil de contact agissant au point A (affectée de la masse mobile
- Établir l'équation différentielle vérifiée par la variable de position
du point A .
- Nous négligeons le terme d'amortissement du système (
).
- Exprimer la composante
dans la situation où le point A suit la déformée du fil de contact. - Établir la condition que doit vérifier le rapport
garantissant que le contact reste maintenu. On fera apparaître un rapport critique , fonction du rapport . Analyser ce résultat.
- Par la suite, nous supposerons que l'on se situe dans le régime
.
- Dans le cas où
ne vérifie pas la condition de contact permanent, déterminer la phase correspondant à la rupture de contact du pantographe, ainsi que les position et vitesse associées.
On posera. - Nous posons
. Préciser l'équation horaire du mouvement du point A dans la phase qui suit le décollage et avant reprise du contact. - Nous supposons que
. Analyser le comportement du pantographe et sa conséquence sur les conditions de fonctionnement du train.
- Lorsque le coefficient d'amortissement
est pris en compte, la condition de non décollement prend la forme :
- Proposer une interprétation du paramètre
(ou de ). - À partir d'une interprétation graphique de cette condition indiquer si l'amortissement est un facteur favorisant le décollement ou au contraire le défavorisant.
3 Étude de la réponse dynamique verticale du pantographe.
Nous adoptons dans cette partie une modélisation plus fidèle du premier mode propre du pantographe. Par ailleurs, nous tenons compte du comportement dynamique du fil de contact. Nous analyserons la réponse verticale du pantographe dans deux situations particulières. L'une concerne la phase de mise en contact initiale du pantographe avec le fil de contact, à partir de sa position de repos. L'autre se rapporte à sa réponse à un défaut géométrique du fil de contact, lorsque le train circule. Le modèle mécanique du pantographe et de l'ensemble caténaire adopté est représenté figure (6). On notera que l'orientation de l'axe (
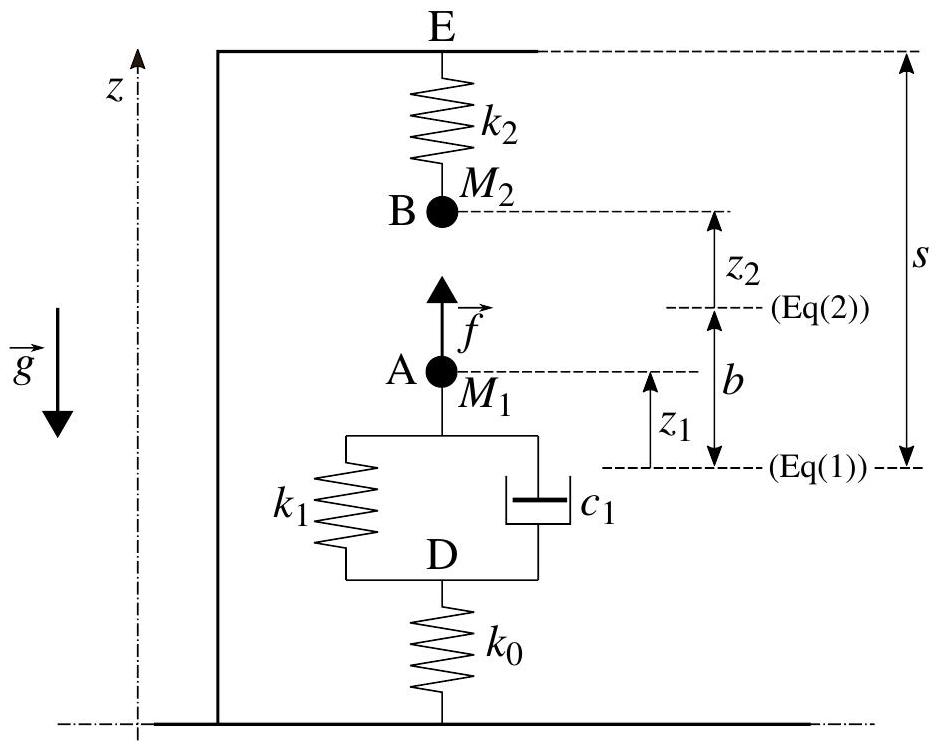
Figure 6 - Modèle mécanique du pantographe et de l'ensemble caténaire (phase de mise en contact). Les positions des points A et B sont comptées depuis leur situation d'équilibre respective, sous la seule action de
Le point A , affecté de la masse
Pour mettre en contact le pantographe et le fil, c'est-à-dire les points A et B. Un vérin applique une force
Nous notons
Pour mettre en contact le pantographe et le fil, c'est-à-dire les points A et B. Un vérin applique une force
Nous notons
3.1 Étude de la phase de mise en contact du pantographe avec le fil de contact.
Nous nous intéressons à la montée du pantographe, jusqu'à sa mise en contact avec le fil de contact, sous l'action de la force
15. Établir la fonction de transfert
15. Établir la fonction de transfert
On notera que le pantographe (
- Nous supposons que la force
évolue selon un échelon tel que :
- Exprimer la réponse
dans le cas où l'on peut négliger tous les termes de la fonction de transfert faisant intervenir la masse , devant ses autres termes (on remplacera simplement par 0 ). Nous poserons et . - Préciser, qualitativement, comment serait modifiée cette réponse si la masse
avait été prise en compte. - Nous posons
et notons le temps pour lequel le contact entre A et B s'établit (pour ). Exprimer le rapport en fonction de . - Le contact des points A et B étant établi, déterminer leur position d'équilibre commune
que l'on exprimera en fonction de et .
3.2 Étude de l'influence d'un défaut de positionnement vertical du fil de contact.
Durant la vie de l'installation, des évènements imprévisibles peuvent modifier l'altitude du fil de contact (rupture de suspente, fluage des terrains de fondation des poteaux caténaires, ...). Il convient donc d'étudier les risques de décollement que ces modulations d'altitude, dont l'amplitude et la fréquence spatiale peuvent varier dans une large gamme, sont susceptibles d'occasionner. En phase de déplacement du train, le comportement dynamique vertical conjugué du pantographe et du fil de contact est modélisé selon le schéma de la figure (7). Il s’agit de la situtation étudiée dans la partie (3.1), après mise en contact des points A et B .
Nous notons
Le défaut de positionnement vertical est modélisé par un déplacement imposé du point E autour de sa position sans défaut
Nous notons
Le défaut de positionnement vertical est modélisé par un déplacement imposé du point E autour de sa position sans défaut
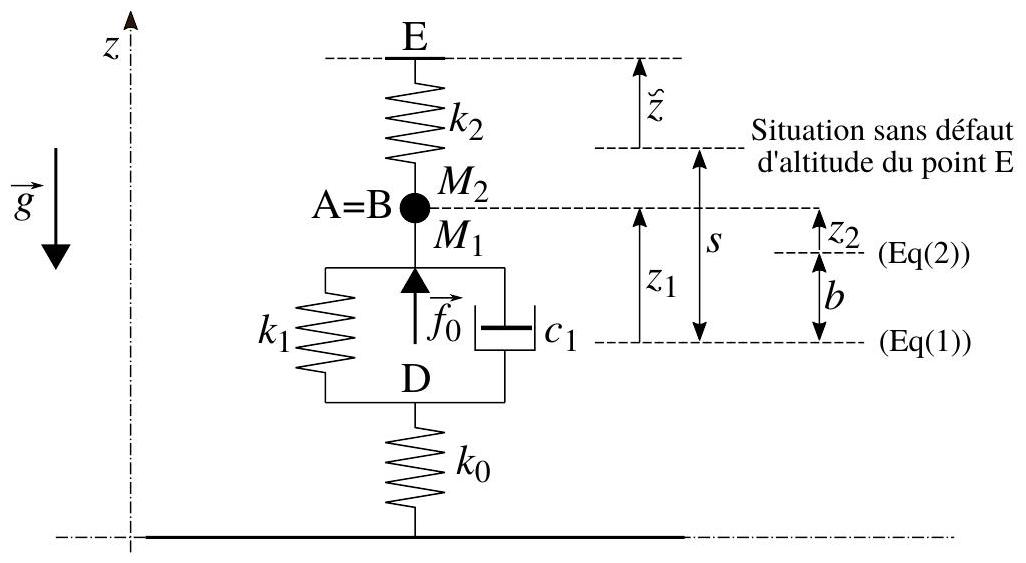
Figure 7 - Modèle mécanique de l'ensemble pantographe-fil de contact pendant la circulation du train. Le défaut d'altitude du fil de contact est représenté par la variable
La fonction de transfert traduisant la réponse dynamique de la force de contact
Tous les paramètres qui interviennent dans cette fonction sont des grandeurs réelles positives.
20. En raisonnant physiquement sur le modèle de la figure (7) exprimer
21. Préciser de quelle manière la fonction de transfert
20. En raisonnant physiquement sur le modèle de la figure (7) exprimer
21. Préciser de quelle manière la fonction de transfert
- Le tracé du rapport
est représenté figure (8).
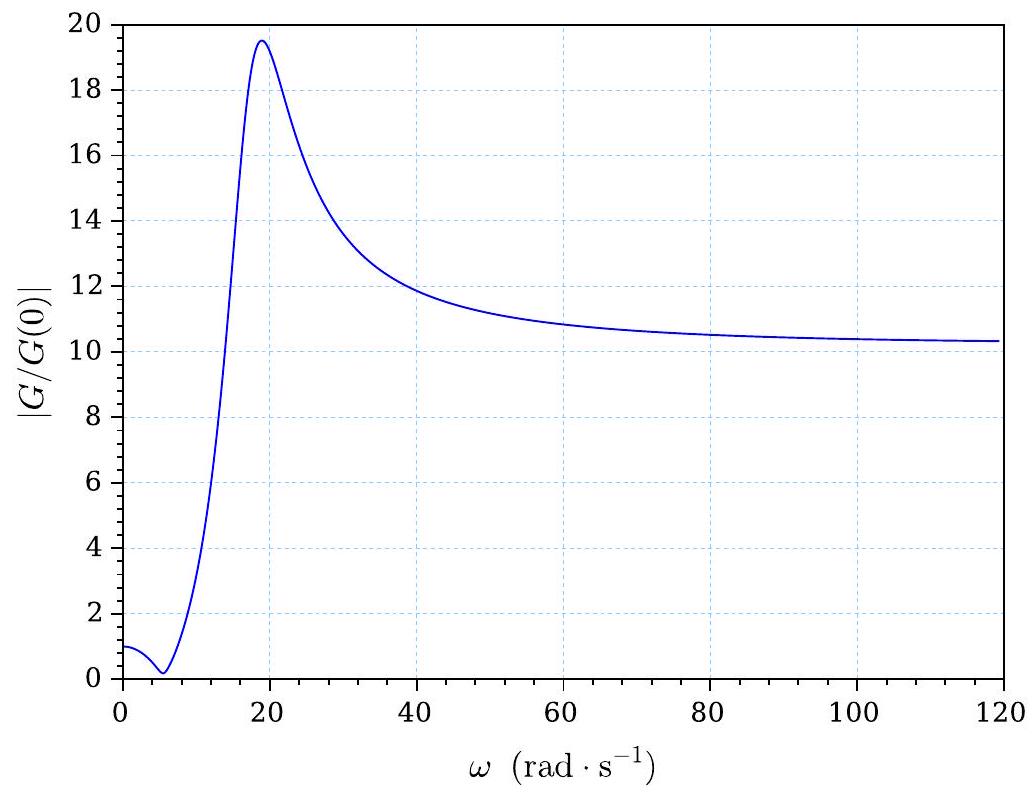
Figure 8 - Rapport
- Analyser, à partir du tracé de la figure (8), le comportement mécanique de ce système. Indiquer ce que ce tracé permet d'inférer des différents temps caractéristiques intervenant dans l'équation (5).
- Établir le lien entre la vitesse
du train et la longueur d'onde du défaut de hauteur qui permet d'identifier un risque potentiel de perte de contact.
Pour un train roulant àpréciser la valeur de la longueur d'onde susceptible de provoquer une perte de contact.
- En pratique, les rôles sont intervertis. Il est plus aisé de chauffer le plan qui est fixe que le solide qu'il est impératif de ne pas perturber autrement que thermiquement.
- Mais pas trop, afin de ne pas rendre le système trop sensible aux vibrations parasites susceptibles d'amorcer le glissement de la plaque.
- Une force par unité de surface est une pression. En mécanique des matériaux on parle plutôt de contrainte.
- Il s'agit d'un phénomène de relaxation de contrainte.
- Le choix de la longueurs de chaque suspente permet de compenser la déformée du câble porteur, comme cela est mentionné dans l'introduction de la section (1).